推荐慕课网视频:
====Storm的起源。
Storm是开源的、分布式、流式计算系统
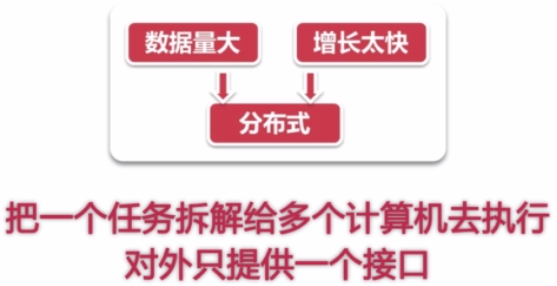
什么是分布式呢?就是将一个任务拆解给多个计算机去执行,让许多机器共通完成同一个任务,
把这个多机的细节给屏蔽,对外提供同一个接口、同一个服务,这样的系统就是分布式系统。
在多年以前并没有非常范用的分布式系统,即使存在,也都是限定在指定的领域,
当然,也有人尝试从中提取出共通的部分,发明一个通用的分布式系统,但是都没有很好的结果。
后来,Google发表了3篇论文,提出了分布式计算的模型,在分布式系统上有了一个质的突破。

有一位大牛看了这3篇论文之后,深受启发,然后就发明了Hadoop系统。
然后,基于Hadoop的改造系统就如雨后春笋一般,接二连三的出现了。
以至于,Hadoop已经不是一套软件,而是一整套生态系统了。
于是,人们谈到分布式,就必谈Hadoop了。
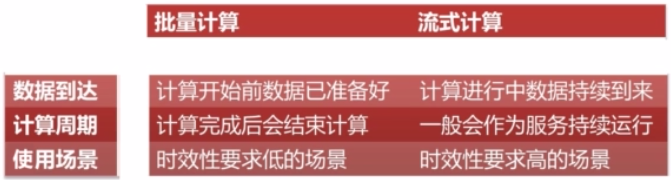
但是,Hadoop并不是万能的,它只能处理适合进行批量计算的需求。对于,非批量的计算就不能够满足要求了。
很多时候,我们只能先收集一段时间数据,等数据收集到一定规模之后,我们才开始MapReduce处理。
有这么一个故事:
-------------------
路人甲是在一家媒体公司A工作,他的主要工作内容很简单,就是在一些搜索引擎上做广告,
众所周知,搜索引擎上的广告是竞价排名的,谁土豪谁就排前面,出钱少的就只能排在后面。
公司A的竞争对手都比较土豪,所以呢,公司A的广告就一直排在后面,也没什么好的办法。
后来,路人甲想出了一个馊主意,就是用程序不断的去点击竞争对手的广告,让对手的广告费
很快的花费调,这样公司A就可以廉价的将广告排在前面了。
搜索引擎公司试图识别出这些恶意点击屏来保护商家,将这些恶意点击扣除的费用返还给商家。
一般来说呢,如果利用MapReduce,一般情况下,都需要收集一段时间数据,然后根据这些
数据来算出哪些点击是恶意的,本身收集数据就已经很耗费时间了,再等计算完毕之后,
土豪商家的广告费也基本上不剩什么了。
所以呢,我们希望在点击发生的时候就算出来该点击是否是作弊行为,及时不能马上判断出,
也应该尽早的计算出来。
-------------------
为了解决上面这个故事的需求,分布式流式计算系统就产生了,比较知名的有:
•【Yahoo】S4
•【IBM】StreamBase
•【Amazon】Kinesis
•【Spark】Streaming
•【Google】Millwheel
•【Apache】Storm(目前业界中最知名、流程)
批量计算(以Hadoop为代表)与流式计算的区别有哪些呢?
###################
目前已经有人在做一些前瞻性的项目,这些人试图将批量计算和流式计算进行整合
试图使用同一套API,即搞定流式计算,又搞定批量计算。
使一段代码不要任何改动,就可以同时执行在批量计算和流式计算两种系统之上。
这种系统目前比较有名的有:
【Twitter】Summing Bird
【Google】CloudDataflow
两个接口都已经开源了。等以后有机会一定要提前接触一下。
###################
====Storm组件
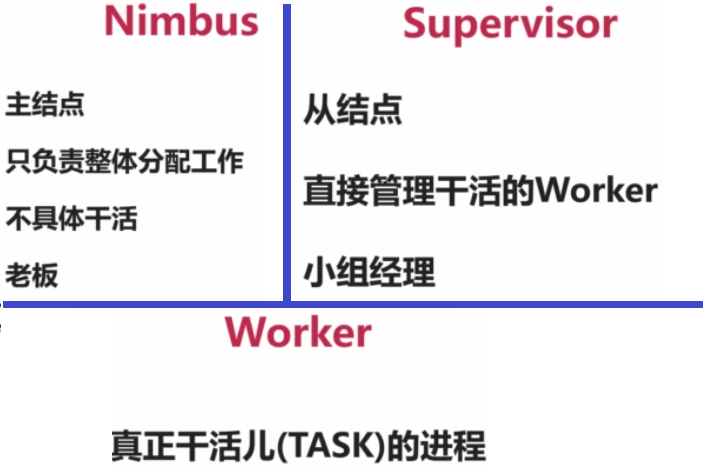
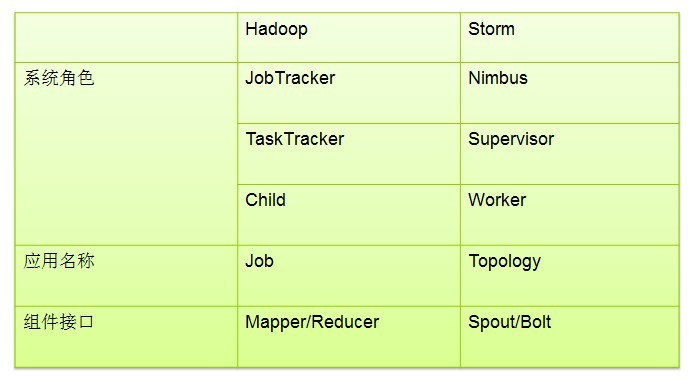
Storm采用的是主从结构,就是使用一台主节点来管理整个集群的运行状态。
这个主节点被称为:Nimbus,从节点用来维护每台机器的状态,被称为:Supervisor

为什么采取主从结构呢?主从结构比较简单,不需要进行主节点仲裁等工作。

从前面的结构图中我们还可以看出,采取主从结构之后,Nimbus是一个单点,
但是,我们知道分布式领域里,大家都比较讨厌自己的系统设计中存在单点,
因为单点如果发生故障,很有可能影响到整个集群的可用性。
所以,如果一个系统设计中如果存在单点,一般情况下这个单点的作业必然比较轻,
挂了之后,短时间之内也不影响真个系统的运行,并且一般情况下都是没有状态的,
宕机之后至需要重启就能够恢复并正确处理。
Nimbus的角色是只负责一些管理性的工作,它并不关心Worker之间的数据是如何传输的,
它的一些主要状态都存在分布式协调服务(Zookeeper)中,内存里面的东西都是可以丢失的,
如果它挂掉,只要没有运算节点发生故障,那么整个作业还是能够正常的进行数据处理的。
Nimbus重启之后,就可以正确处理真个系统的事务了。
Supervisor的角色是听Nimbus的话,来启动并监控真正进行计算的Worker的进程,
如果Worker有异常,那么久帮助Worker重启一下,它也不负责数据计算和数据传输,
真正的数据计算和输出,都是由Worker来进行。
Worker是运行在工作节点上面,被Supervisor守护进程创建的用来干活的JVM进程。
每个Worker对应于一个给定topology的全部执行任务的一个子集。
反过来说,一个Worker里面不会运行属于不同的topology的执行任务。
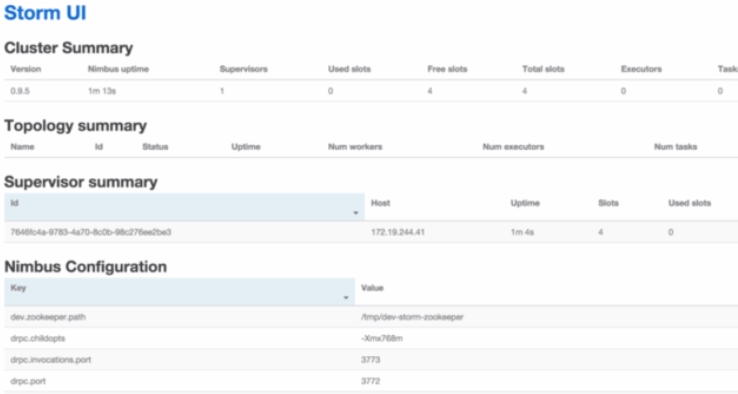
====Storm UI
为了方便用户管理集群,查看集群运行状态,提供了一个基于Web的UI来监控整个Storm集群
它本身不是集群运行的必须部分,它的启动停止都不影响Storm的正常运行。
====Storm作业提交运行流程
(1)用户使用Storm的API来编写Storm Topology。
(2)使用Storm的Client将Topology提交给Nimbus。
Nimbus收到之后,会将把这些Topology分配给足够的Supervisor。
(3)Supervisor收到这些Topoligy之后,Nimbus会指派一些Task给这些Supervisor。
(4)Nimvus会指示Supervisor为这些Task生成一些Worker。
(5)Worker来执行这些Task来完成计算任务。
====StormAPI基础概念
Storm称用户的一个作业为Topology(拓扑)。

为什么叫拓扑呢?是因为Storm的一个拓扑主要包含了许多的数据节点,还有一些计算节点,
以及这些节点之间的边,也就是说Storm的拓扑是由这些点和边组成的一个有向无环图。
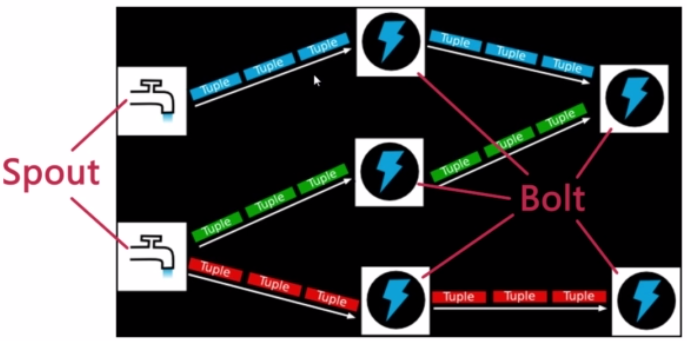
这些点有两种:数据源节点(Spout)、普通的计算节点(Bolt),
点之间的边称为数据流(Stream),数据流中的每一条记录称为Tuple。

如下图中,每一个“水龙头”表示一个Spout,它会发送一些Tuple给下游的Bolt,
这些Bolt经过处理周,再发送一个Tuple给下一个Bolt,
最后,在这些Bolt里面是可以执行一些写数据到外部存储(如数据库)等操作的。
在图中这个Topology里面我们看到了两个Spout和5个Bolt,
在实际运行的时候,每个Spout节点都可能有很多个实例,每个Bolt也有可能有很多个实例。
就像MapReduce一样,一个Map节点并不代表只有一个并发,而有可能很多个Map实例在跑。
这些Spout和Bolt的这些边里面,用户可以设置多种的Grouping的方式。
有些类似SQL中的Group By。用来制定这些计算是怎么分组的。
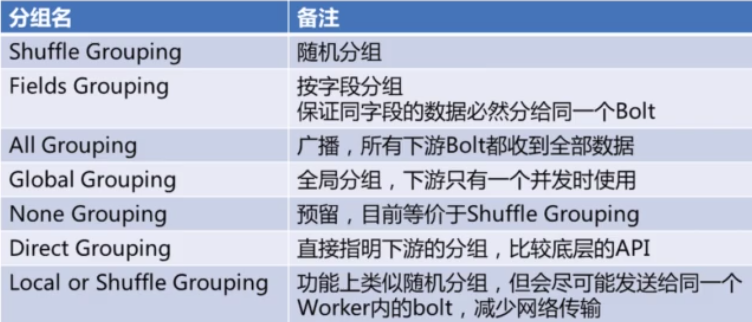
*Fields Grouping:保证同样的字段移动落到同一个Bolt里。
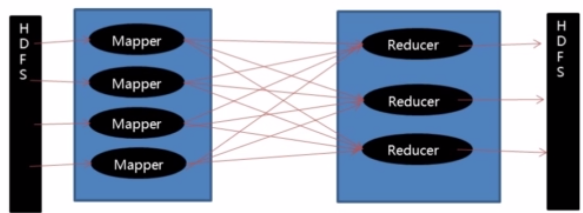
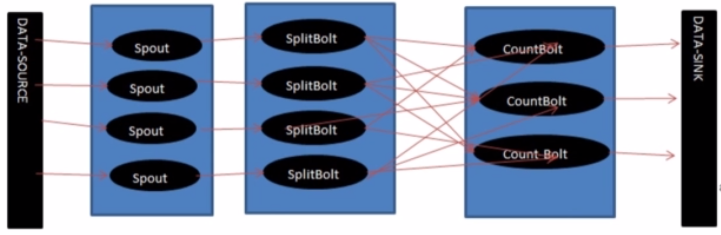
--以WordCount为例,MapReduce和Storm的工作流程对比:

(1)MapReduce
(2)Storm
====各个组件的一些说明
--Topologies
strom jar all-your-code.jar backtype.storm.MyTopology arg1 arg2
--Stream
--数据模型(Data Model)
- public class DoubleAndTripleBoltimplementsIRichBolt {
- private OutputCollectorBase _collector;
- @Override
- public void prepare(Map conf, TopologyContext context, OutputCollectorBase collector) {
- _collector = collector;
- }
- @Override
- public void execute(Tuple input) {
- intval = input.getInteger(0);
- _collector.emit(input,newValues(val*2, val*3));
- _collector.ack(input);
- }
- @Override
- public void cleanup() {
- }
- @Override
- public void declareOutputFields(OutputFieldsDeclarer declarer) {
- declarer.declare(newFields("double","triple"));
- }
- }
参考博客:
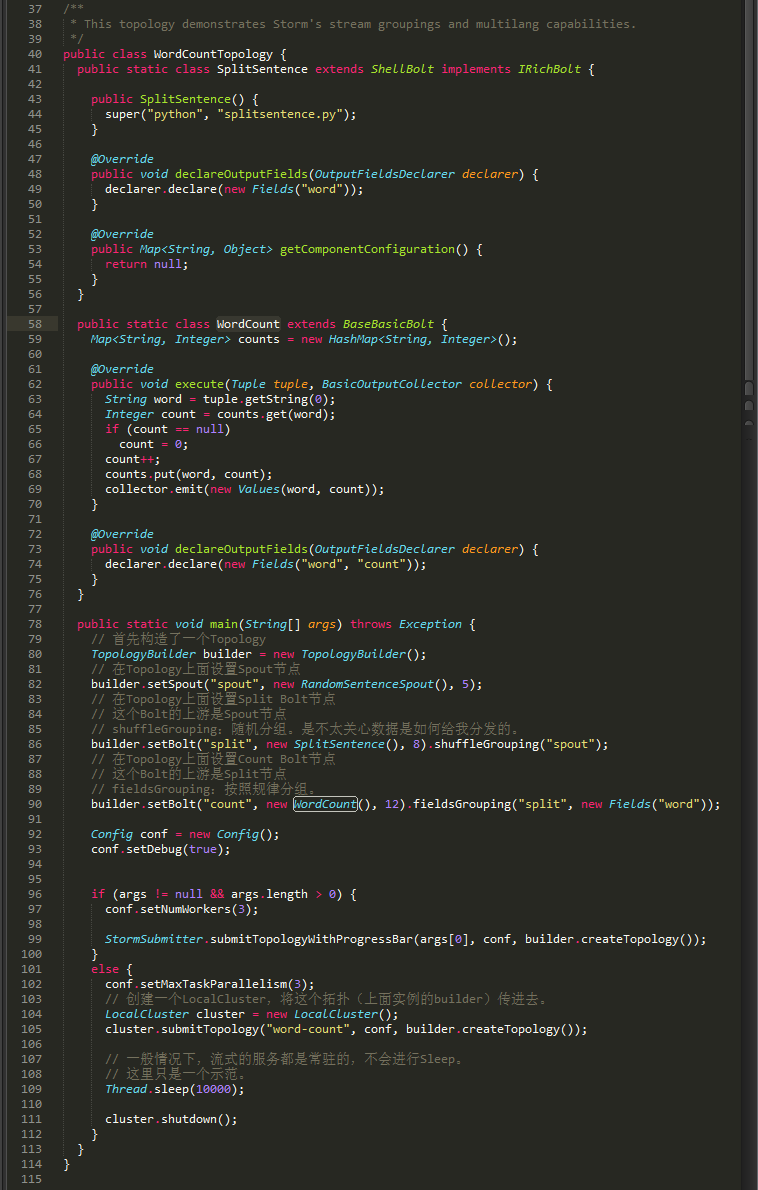
====StormAPI使用
我们来看看WorldCount的example代码。
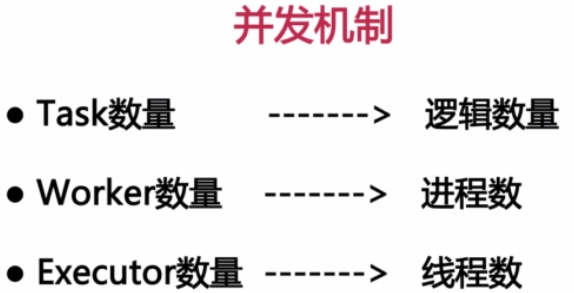
====Storm的并发机制
Task数量:表示每个Spout或Bolt逻辑上有多少个并发。它影响输出结果。
Worker数量:代表总共有几个JVM进程去执行我们的作业。
Executor数量:表示每个Spout或Bolt启动几个线程来运行。
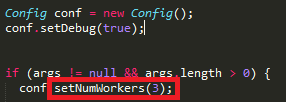
下面代码中的数字表示Executor数量,它不影响结果,影响性能。

Worker的数量在Config中设置,下图代码中的部分表示Worker数量。
*本地模式中,Worker数不生效,只会启动一个JVM进行来执行作业。
*只有在集群模式设置Worker才有效。而且集群模式的时候一定要设置才能体现集群的价值。
====Storm数据可靠性
分布式系统都管理很多台机器,需要保证任意的Worker挂掉之后,我们的系统仍然能正确的处理,那么
Storm如何保证这些数据正确的恢复?
Storm如何保证这些数据不被重复计算?

(1)Spout容错API:NextTuple中,emit时,指定MsgID。
(2)Bolt容错API:①emit时,锚定输入Tuple。②Act输入Tuple。
====Storm集群搭建
(1)安装zookeeper集群
配置方法省略。
(2)下载安装Storm
官网上下载Storm:http://storm.apache.org
上传至Linux并解压缩。这里将Storm解压缩到/opt/apache-storm-0.10.0路径下了。
(3)修改Storm配置文件
配置文件路径:/opt/apache-storm-0.9.5/conf/storm.yaml
配置内容如下:
----------------
storm.zookeeper.servers:
- "192.168.93.128" - "192.168.93.129" - "192.169.93.130" nimbus.host: "192.168.93.128" storm.local.dir: "/opt/apache-storm-0.9.5/status" supervisor.slots.ports: - 6700 - 6701 - 6702 - 6703----------------
置之后的文件如下如所示:

--Storm配置项详细介绍
•storm.zookeeper.servers:
ZooKeeper服务器列表
•storm.zookeeper.port:
ZooKeeper连接端口
•storm.local.dir:
storm使用的本地文件系统目录(必须存在并且storm进程可读写)
•storm.cluster.mode:
Storm集群运行模式([distributed|local])
•storm.local.mode.zmq:
Local模式下是否使用ZeroMQ作消息系统,如果设置为false则使用java消息系统。默认为false
•storm.zookeeper.root:
ZooKeeper中Storm的根目录位置
•storm.zookeeper.session.timeout:
客户端连接ZooKeeper超时时间
•storm.id:
运行中拓扑的id,由storm name和一个唯一随机数组成。
•nimbus.host:
nimbus服务器地址
•nimbus.thrift.port:nimbus的thrift监听端口
•nimbus.childopts:
通过storm-deploy项目部署时指定给nimbus进程的jvm选项
•nimbus.task.timeout.secs:
心跳超时时间,超时后nimbus会认为task死掉并重分配给另一个地址
•nimbus.monitor.freq.secs:
nimbus检查心跳和重分配任务的时间间隔。注意如果是机器宕掉nimbus会立即接管并处理
•nimbus.supervisor.timeout.secs:
supervisor的心跳超时时间,一旦超过nimbus会认为该supervisor已死并停止为它分发新任务
•nimbus.task.launch.secs:
task启动时的一个特殊超时设置。在启动后第一次心跳前会使用该值来临时替代nimbus.task.timeout.secs
•nimbus.reassign:
当发现task失败时nimbus是否重新分配执行。默认为真,不建议修改
•nimbus.file.copy.expiration.secs:
nimbus判断上传/下载链接的超时时间,当空闲时间超过该设定时nimbus会认为链接死掉并主动断开
•ui.port:
Storm UI的服务端口
•drpc.servers:
DRPC服务器列表,以便DRPCSpout知道和谁通讯
•drpc.port:
Storm DRPC的服务端口
•supervisor.slots.ports:
supervisor上能够运行workers的端口列表。每个worker占用一个端口,且每个端口只运行一个worker。
通过这项配置可以调整每台机器上运行的worker数。(调整slot数/每机)
•supervisor.childopts:
在storm-deploy项目中使用,用来配置supervisor守护进程的jvm选项
•supervisor.worker.timeout.secs:
supervisor中的worker心跳超时时间,一旦超时supervisor会尝试重启worker进程.
•supervisor.worker.start.timeout.secs:
supervisor初始启动时,worker的心跳超时时间,当超过该时间supervisor会尝试重启worker。
因为JVM初始启动和配置会带来的额外消耗,从而使得第一次心跳会超过supervisor.worker.timeout.secs的设定
•supervisor.enable:
supervisor是否应当运行分配给他的workers。默认为true,该选项用来进行Storm的单元测试,一般不应修改.
•supervisor.heartbeat.frequency.secs:
supervisor心跳发送频率(多久发送一次)
•supervisor.monitor.frequency.secs:
supervisor检查worker心跳的频率
•worker.childopts:
supervisor启动worker时使用的jvm选项。所有的”%ID%”字串会被替换为对应worker的标识符
•worker.heartbeat.frequency.secs:
worker的心跳发送时间间隔
•task.heartbeat.frequency.secs:
task汇报状态心跳时间间隔
•task.refresh.poll.secs:
task与其他tasks之间链接同步的频率。(如果task被重分配,其他tasks向它发送消息需要刷新连接)
。一般来讲,重分配发生时其他tasks会理解得到通知。该配置仅仅为了防止未通知的情况。
•topology.debug:
如果设置成true,Storm将记录发射的每条信息。
•topology.optimize:
master是否在合适时机通过在单个线程内运行多个task以达到优化topologies的目的
•topology.workers:
执行该topology集群中应当启动的进程数量。
每个进程内部将以线程方式执行一定数目的tasks。topology的组件结合该参数和并行度提示来优化性能
•topology.ackers:
topology中启动的acker任务数。
Acker保存由spout发送的tuples的记录,并探测tuple何时被完全处理。
当Acker探测到tuple被处理完毕时会向spout发送确认信息。通常应当根据topology的吞吐量来确定acker的数目,但一般不需要太多。
当设置为0时,相当于禁用了消息可靠性。storm会在spout发送tuples后立即进行确认
•topology.message.timeout.secs:
topology中spout发送消息的最大处理超时时间。
如果一条消息在该时间窗口内未被成功ack,Storm会告知spout这条消息失败。而部分spout实现了失败消息重播功能。
•topology.kryo.register:
注册到Kryo(Storm底层的序列化框架)的序列化方案列表。序列化方案可以是一个类名,或者是com.esotericsoftware.kryo.Serializer的实现
•topology.skip.missing.kryo.registrations:
Storm是否应该跳过它不能识别的kryo序列化方案。如果设置为否task可能会装载失败或者在运行时抛出错误
•topology.max.task.parallelism:
在一个topology中能够允许的最大组件并行度。该项配置主要用在本地模式中测试线程数限制.
•topology.max.spout.pending:
一个spout task中处于pending状态的最大的tuples数量。该配置应用于单个task,而不是整个spouts或topology
•topology.state.synchronization.timeout.secs:
组件同步状态源的最大超时时间(保留选项,暂未使用)
•topology.stats.sample.rate:
用来产生task统计信息的tuples抽样百分比
•topology.fall.back.on.java.serialization:
topology中是否使用java的序列化方案
•zmq.threads:
每个worker进程内zeromq通讯用到的线程数
•zmq.linger.millis:
当连接关闭时,链接尝试重新发送消息到目标主机的持续时长。这是一个不常用的高级选项,基本上可以忽略.
•java.library.path:
JVM启动(如Nimbus,Supervisor和workers)时的java.library.path设置。该选项告诉JVM在哪些路径下定位本地库
(4)配置Storm环境变量
环境变量位置:/etc/profile
配置内容之后如下图所示:

注意:环境变量修改只有,一定要使用Source命令来使之生效。
(5)启动Storm
--启动Storm UI
命令:storm ui >/dev/null 2>&1 &
我们可以它启动的时候相关的输出指向到/def/null,并且把错误也重新定向到正常输出。
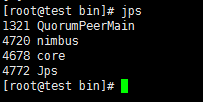
--启动主节点(Nimbus节点)
命令:storm nimbus >/dev/null 2>&1 &
在第1台Linux虚拟机上执行。正常启动时的jps结果如下图所示:
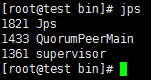
--启动工作节点(Supervisor节点)
命令:storm supervisor >/dev/null 2>&1 &
在第2、3台Linux虚拟机上执行。正常启动时的jps结果如下图所示:
(6)启动StormUI监控页面:
Storm正常启动之后,应该可以打开StormUI画面。在浏览器中输入地址和端口即可
正确启动时应该如下图所示:

--Mainpage:
main页面主要包括3个部分
【Cluster Summary】
•Nimbus uptime: nimbus的启动时间
•Supervisors: storm集群中supervisor的数目
•used slots: 使用了的slots数
•free slots: 剩余的slots数
•total slots: 总的slots数
•Running tasks: 运行的任务数
【topology summary】
•Name: topology name
•id: topology id (由storm生成)
•status: topology的状态,包括(ACTIVE, INACTIVE, KILLED, REBALANCING)
•uptime: topology运行的时间
•num workers: 运行的workers数
•num tasks: 运行的task数
【supervisor summary】
•host: supervisor(主机)的主机名
•uptime: supervisor启动的时间
•slots: supervisor的端口数
•used slots: 使用的端口数
--Topology page
topology页面主要包括4个部分
【topology summary】
(同主页)
【topology stats】
•window: 时间窗口,显示10m、3h、1d和all time的运行状况
•emitted: emitted tuple数
•transferred: transferred tuple数, 说下与emitted的区别:如果一个task,emitted一个tuple到2个task中,则transferred tuple数是emitted tuple数的两倍
•complete latency: spout emitting 一个tuple到spout ack这个tuple的平均时间
•acked: ack tuple数
•failed: 失败的tuple数
【spouts】
•id: spout id
•parallelism: 任务数
•last error: 最近的错误数,只显示最近的前200个错误
•emitted、transferred、complete latency、acked和failed上面已解释
【bolts】
•process latency: bolt收到一个tuple到bolt ack这个tuple的平均时间
其他参数都解释过了
还有componentpage和taskpage,参数的解释同上。
taskpage中的Component指的是spoutid或者boltid,time指的是错误发生的时间,error是指错误的具体内容。
====Storm常用命令
【提交Topologies】
命令格式:storm jar 【jar路径】 【拓扑包名.拓扑类名】 【拓扑名称】
样例:storm jar /storm-starter.jar storm.starter.WordCountTopology wordcountTop
#提交storm-starter.jar到远程集群,并启动wordcountTop拓扑。
【停止Topologies】
命令格式:storm kill 【拓扑名称】
样例:storm kill wordcountTop
#杀掉wordcountTop拓扑。
【启动nimbus后台程序】
命令格式:storm nimbus
【启动supervisor后台程序】
命令格式:storm supervisor
【启动drpc服务】
命令格式:storm drpc
【启动ui服务】
命令格式:storm ui
【启动REPL】
REPL — read-evaluate-print-loop。
虽然clojure可以作为一种脚本语言内嵌在java里面,但是它的首选编程方式是使用REPL,这是一个简单的命令行接口,
使用它你可以输入你的命令,执行,然后查看结果, 你可以以下面这个命令来启动REPL:
命令格式:storm repl
【打印本地配置】
命令格式:storm localconfvalue [配置参数关键字]
举例:storm localconfvalue storm.zookeeper.servers
#根据指定参数打印本地配置的值。
【打印远程配置】
命令格式:storm remoteconfvalue [配置参数关键字]
举例:storm remoteconfvalue storm.zookeeper.servers
#根据指定参数打印远程配置的值。
【执行Shell脚本】
命令格式:storm shell resourcesdir command args
【打印CLASSPATH】
命令格式:storm classpath
====Storm调优:
--调优对象
当一个topology在storm cluster中运行时,它的并发主要跟3个逻辑对象相关:worker => executor =>task。(=>代表1对N)
(1)Worker
Worker是运行在工作节点上面,被Supervisor守护进程创建的用来干活的JVM进程。
每个Worker对应于一个给定topology的全部执行任务的一个子集。
反过来说,一个Worker里面不会运行属于不同的topology的执行任务。
它可以通过[storm rebalance]命令任意调整。
(2)Executor可以理解成一个Worker进程中的工作线程。
一个Executor中只能运行隶属于同一个component(spout/bolt)的task。
一个Worker进程中可以有一个或多个Executor线程。在默认情况下,一个Executor运行一个task。
它可以通过[storm rebalance]命令任意调整。
(3)TaskTask则是spout和bolt中具体要干的活了。一个Executor可以负责1个或多个task。
每个component(spout/bolt)的并发度就是这个component对应的task数量。
同时,task也是各个节点之间进行grouping(partition)的单位。无法在运行时调整。
--设置方法:
conf.setNumWorkers(workers); //设置worker数量
uilder.setBolt("2", new WordSpliter(),4) //设置Executor并发数量
builder.setBolt("2", new WordSpliter(),4).setNumTasks(1); //设置每个线程处理的Task数量
--任务分配:任务分配是有下面两种情况:
①、task数目比worker多:
例如task是[1 2 3 4],可用的slot(所谓slot就是可用的worker)只有[host1:port1,host2:port1],那么最终是这样分配
1:[host1:port1]2:[host2:port1]
3:[host1:port1]
4:[host2:port1]
②、task数目比worker少:例如task是[1 2],而worker有[host1:port1,host1:port2,host2:port1,host2:port2],
那么首先会将woker排序,将不同host间隔排列,保证task不会全部分配到同一个机器上,也就是将worker排列成
[host1:port1,host2:port1,host1:port2,host2:port2]
然后分配任务为:
1:[host1:port1]
2:[host2:port1]
--简单举例:
通过Config.setNumWorkers(int))来指定一个storm集群中执行topolgy的进程数量,所有的线程将在这些指定的worker进程中运行。
比如说一个topology中要启动300个线程来运行spout/bolt,而指定的worker进程数量是60个。
那么storm将会给每个worker分配5个线程来跑spout/bolt。
如果要对一个topology进行调优,可以调整worker数量和spout/bolt的parallelism(并发度,即executor)数量。
(调整参数之后要记得重新部署topology,后续会为该操作提供一个swapping的功能来减小重新部署的时间)。
例如:
builder.setBolt("cpp", new CppBolt(), 3).setNumTasks(5).noneGrouping(pre_name); 会创建3个线程,但有内存中会5个CppBolt对象,3个线程调度5个对象。
--网上搜罗的一些经验:
①、对于worker和task之间的比例,网上也给出了参考,。即1个worker包含10~15个左右。当然这个参考,实际情况还是要根据配置和测试情况。②、executor数最大不能超过该bolt的task数。
--Strom集群命令
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 | [root @h2master bin]# storm Commands: activate classpath deactivate dev-zookeeper drpc help 命令帮助 jar 执行上传的jar包 kill 杀死正在执行的topology 后面跟 topology的名称 list 查看运行的所有topology运行情况 localconfvalue logviewer 启动topology日志 nimbus 启动nimbus rebalance shell方式下修改topology运行参数比如worker个数 task个数等 remoteconfvalue repl shell supervisor 启动supervisor ui 启动topology ui界面 version Help: help help <command> |
- [root@h2master bin]# storm
- Commands:
- activate
- classpath
- deactivate
- dev-zookeeper
- drpc
- help 命令帮助
- jar 执行上传的jar包
- kill 杀死正在执行的topology 后面跟 topology的名称
- list 查看运行的所有topology运行情况
- localconfvalue
- logviewer 启动topology日志
- nimbus 启动nimbus
- rebalance shell方式下修改topology运行参数比如worker个数 task个数等
- remoteconfvalue
- repl
- shell
- supervisor 启动supervisor
- ui 启动topology ui界面
- version
- Help:
- help
- help <command>
转载自http://www.cnblogs.com/quchunhui/p/5370191.html
--END--